ログインループ怖い (ubuntu18.04)
概要
普段使いしているPC(ubuntu18.04 desktop)でログインループにハマって怖い目にあったのでメモ。
そのときは突然、、。
それは、ある日起きた突然の出来事であった。
よし、今日もやるかー。 ログインするぞー。 あれ、また同じ画面に戻った。何だよ~もっかいやってやるよ。ん、また戻ってきたぞ。 もしや、これが噂のログインループなのか?
考えられる原因
以上のような事が起きた。原因を考えるとGPUドライバの再インストールをいつもとは違う方法 で行っていたのがいけないのではないかと考えた。
解決の流れ
CLIでのログインはできた。
DocumentフォルダーにNVIDIAドライバーのスクリプトを保存していたのでそれを実行して、いつも通りのやり方で 再インストールを行った。
無事ログインできた。
(´・ω・`)こぇー
PCのlocal IPの変更方法(Ethernet)(Windows&ubuntu)
概要
3DLiDARを使用する際にIPアドレスによる通信設定でつまずいたのでメモ。
やり方
local IPの変更(Windows)
設定画面までの行き方
コントロールパネル➡ネットワークとインターネット➡ネットワークと共有センター➡イーサネット(繋いでる状態じゃないと出てこない)➡プロパティ(P)➡インターネット プロトコル バージョン 4(TCP/IPv4)➡プロパティ
設定画面までの行き方(動画Ver.) www.youtube.com
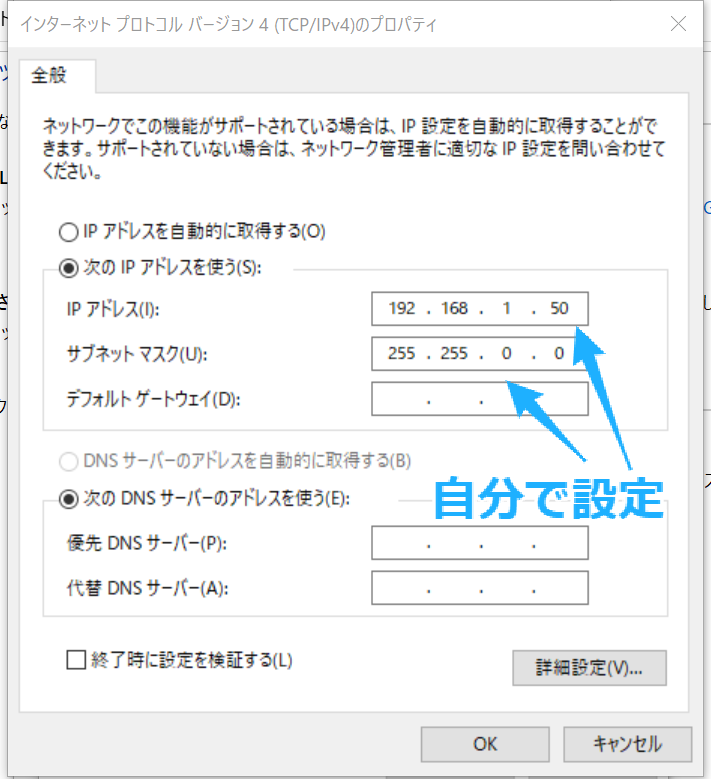
設定画面まで来たら、以下のように適宜記入して設定する。設定したら、設定画面を全部閉じる。(閉じないと反映しないかも、なので)
今回の場合、使用するLiDARのIPアドレスが192.168.1.105、PCのIPアドレスが192.168.22.5であったので以下のように設定した。IPが192.168.1.xxx、subnet maskが255.255.0.0であれば、大丈夫だと思う。
local IPの変更(ubuntu)
ubuntuでのセッティングは結構簡単です。
有線LANの設定を開きます。下の写真のような画面を開きます。
LiDARのIPが10.42.0.200なので、PCのIPを10.42.0.10とかに設定しました。
ネットマスクは255.0.0.0や255.255.255.0に設定します。

gmappingのコツみたいなやつ
概要
屋外でマッピングを行ったことがなかったが実際にやってみたところ、ある程度コツが必要なことに気づいたのでメモ。
コツ
1、直角に曲がる際は気を付ける。
2、直角に曲がるときは、ランドマークを意識して旋回させる。(1の話はコレ)
3、急な操作量を与えない。(マップが暴れ始める)
これだけ、、、、(少ない)
論文読んでから、こういうの書くべきだな。。。
その場凌ぎのマップ作成について(なんだそれ)
概要
怪しいタイトルから分かる通り、しょうもない話である。(そうでもないかも)
経緯
津田沼チャレンジという屋外自律走行チャレンジが大学で行われることになった、、、。 ということで、色々作業を進めていったわけで、何と本場3日前ぐらいなのに、マッピング作業を終えてないという 境地に立たされていた。マップはかなりずれてしまう、またマッピング作業は、結構時間がかかる上にバッテリー問題的に1日に2回程度が限界だった。3日前ということは、マッピング以外にも時間を割く必要があったので正直なところ、今すぐにマップを完成させないといけないという感じだった(その時)。
その時、振り絞って考えたのが、ナビゲーションするところだけ頑張ってきれいにマップを作れば良くないか?という考えである。
結果、必要最小限のマップを作成することで、すぐに他の作業へ移行できた。(マップは問題なく使えたので)
他の機体で作成したマップはやはり、使用できないことを知った(マッチングできない)。
3Dマップなら問題ないかも
rosbagの圧縮ファイルは解凍させてから再生しよう
概要
圧縮された状態のrosbagを再生させたときと解凍した状態のrosbagを再生したときでは挙動が違うことに気づいたのでメモ。
お話
概要で全部話し切った感があるが、改めて説明すると、
圧縮された状態のrosbagを再生させたときと解凍した状態のrosbagを再生したときでは挙動が違うことに気づいた。
今回行った手順&経緯
1.rosbag record -aでrosbagファイルを取得。
2.他のPCに転送する際に容量が大きいので、rosbag compress圧縮して転送。
3.転送された圧縮rosbagファイルをrosbag playでそのまま再生。
4.rosbagとは別にスマホで録画した動画と比較する。
5.再生速度の違いがあることに気が付く。
6.結論を言うと、rosbag decompressで解凍したrosbagファイルの方が録画した動画と同じような時間で再生される。
もしかしたら
もしかしたら、違う手順(何言ってんだ)で圧縮したファイルは問題ないかも知れない(試してないので何とも言えない)。 例えば、rosbag record -jで取得したrosbagファイルの再生とか。